It looks around
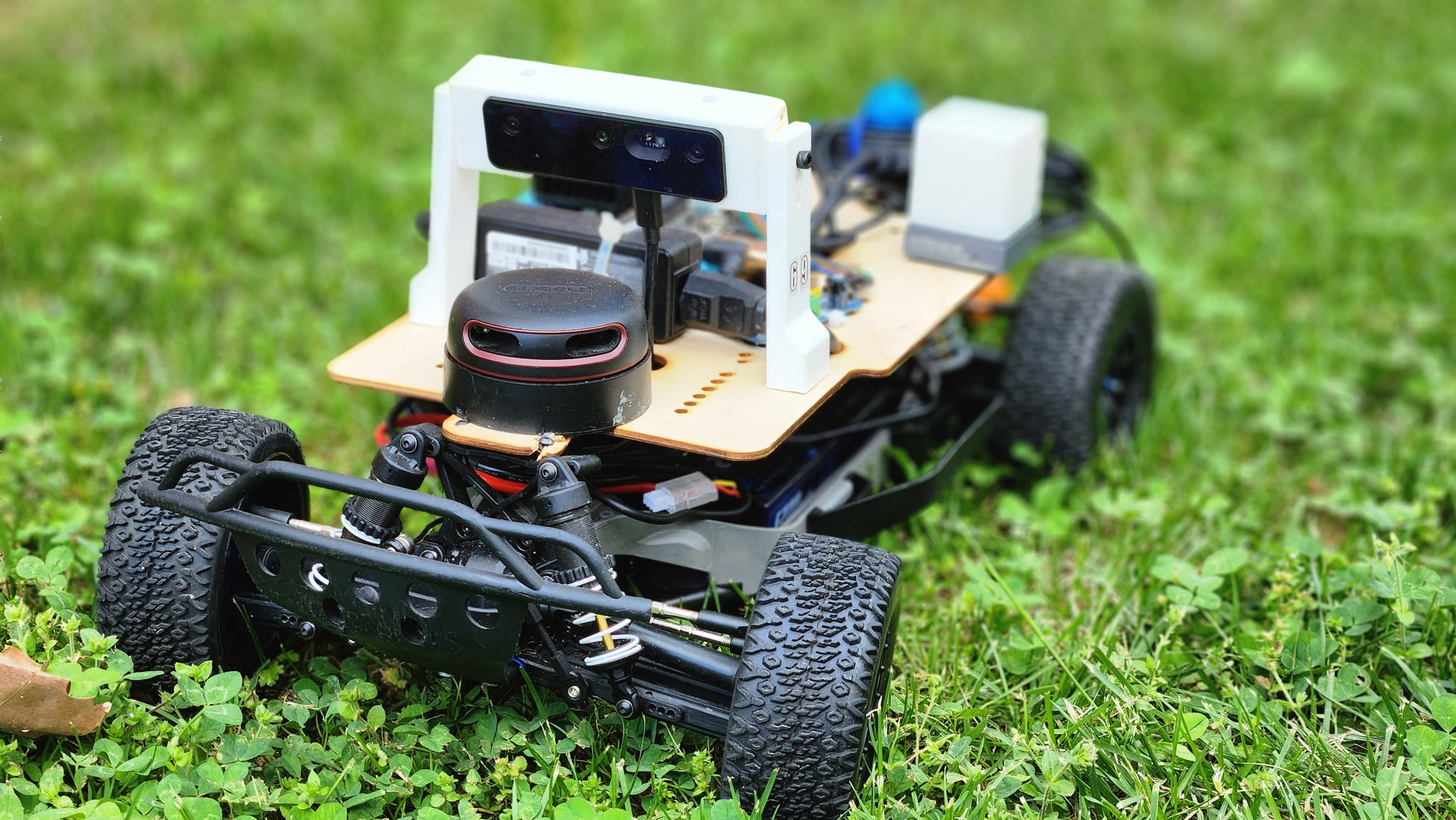
The LiDAR and cameras feed in, and the code stitches them into a picture of what's out there, lanes, cones, curbs, whatever's in the way.
Atlas Autoware is a student team out of Northern Virginia. We started in a basement with a beat-up chassis and a pile of sensors, and we've been teaching it to drive ever since. No professional engineers, just us, after school and most weekends.
We're heading to the 30th RoboRacer Autonomous Racing Competition at IEEE VTC 2026 in Boston. Real wheel-to-wheel autonomous racing, and the biggest start line we've lined up for yet.
Boston, Massachusetts · September 6–9Most of us go to Thomas Jefferson (TJHSST), a few come from other schools nearby. None of us knew how to make a car drive itself when we started. We figured it out the hard way, breaking things, reading papers we barely understood, and staying way too late in the lab. Here's roughly how the car thinks:
The LiDAR and cameras feed in, and the code stitches them into a picture of what's out there, lanes, cones, curbs, whatever's in the way.
Then it works out where to actually go, the smoothest, safest path through the mess in front of it, and keeps re-checking that call constantly.
Last part: turning that plan into real steering, gas, and brakes. This is the bit we spent the most weekends tuning so it doesn't drive like a robot.
A simulator is one thing. A 100-pound car that'll actually drive into a cone if you mess up the math is another. We wanted the real version, the soldering, the dead batteries, the "why is it turning left" debugging at 11pm. That's the stuff you remember.
A huge thank-you to the sponsor helping keep our car on the track and our students building.
A single LiDAR costs more than most of our parents would like. Add cameras, a decent GPU, spare parts we keep breaking, and gas money to drive to competitions, it adds up fast. If you can spare anything, it genuinely keeps us running.
