01 · See it
Raw point clouds and camera frames turn into "okay, there's a lane here, a cone there, open road ahead." Easy to say, painful to get right.
This is the thing we've been building. It's not pretty up close, there's tape involved, but it drives itself around a track, and every wire and line of code on it came from a student.
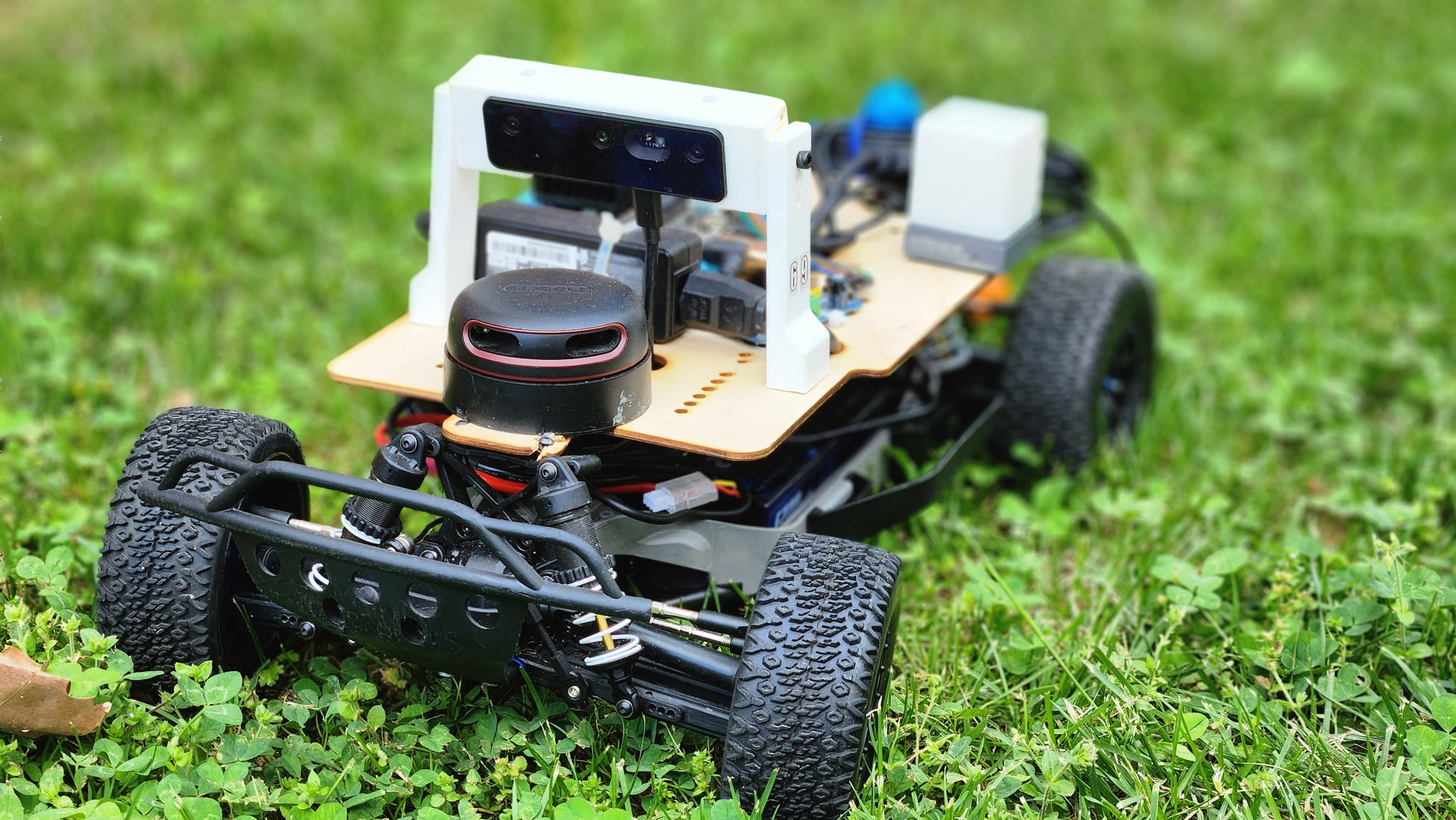 The real thing, not a render
The real thing, not a render
The short version: a LiDAR on top, a couple of cameras up front, an IMU for balance, and a GPU in the back running everything we wrote. Getting all of it to agree on what's happening at the same time was harder than any single piece.
Raw point clouds and camera frames turn into "okay, there's a lane here, a cone there, open road ahead." Easy to say, painful to get right.
If something's moving, we take a guess at where it's going next, so the car isn't only reacting to where things are right now.
It figures out the actual line to drive, staying in bounds, avoiding stuff, and redoes that math constantly as things change.
Finally the plan becomes real steering and throttle. Get this part slightly wrong and the car wobbles like it's had too much coffee.
We're a young team, so this isn't a wall of trophies, it's more like a list of times we showed up, learned a ton, and occasionally did really well. The honest version:
Our next start line: the 30th RoboRacer Autonomous Racing Competition, held at IEEE VTC 2026 in Boston, September 6–9. Real wheel-to-wheel autonomous racing. We're rebuilding the car for speed and counting down the days. Event page →
Up nextIV 2026 in Detroit. We made it to the start, but a last-minute technical issue stopped us short and we couldn't finish. Gutting, honestly, but we walked away knowing exactly what to harden before the next race.
DNF, technical issuesOur very first competition, and it was fully virtual, everything ran in simulation. IGVC went online that year, so we raced our autonomy stack against a mostly-college field and finished 8th. No physical car yet, just our code proving it could hold its own.
8th at IGVC 2022 (sim)A few of us, a secondhand chassis, a box of sensors, and zero idea what we were doing. Somehow that turned into a car that holds its own against college teams.
The beginningEvery upgrade, a sharper sensor, a faster GPU, a tank of gas to get to the next event, comes out of whatever we can scrape together. A little help goes a long way for a team our size.